Proyectos Fin de Grado/Carrera y Tesis Fin de Maśter
Proyectos realizados en el laboratorio de Cibernética "José Mira" del grupo SIMDA.
Proyecto fin de Carrera
Diseño e implementación de un sistema de navegación autónomo para un robot móvil utilizando el algoritmo del campo de las fuerzas virtuales
Autora: Luz María Hidalgo García, Ingeniera Informática UNED
Director: Dr. Félix de la Paz López
Fecha de defensa: 28 de Septiembre de 2015
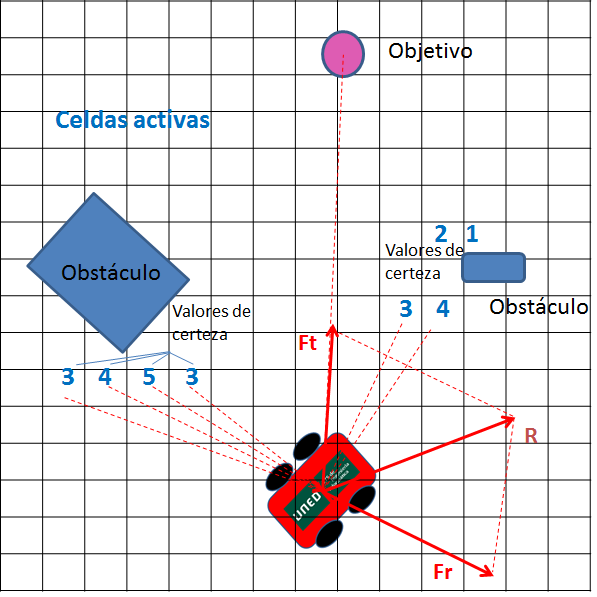
Este proyecto consiste en el diseño e implementación de un sistema de navegación reactivo de comportamientos utilizando el algoritmo de navegación local del campo de las fuerzas virtuales VFF (Virtual Force Field) para dotar al robot de la capacidad de explorar un escenario, con el objetivo de localizar una meta dentro de un mundo dinámico y desconocido, siendo conocida su posición inicial de partida.
El robot que se ha utilizado para este proyecto es el modelo Pioneer 3-AT.Este sistema será capaz de detectar los obstáculos que el robot se encuentre en su camino haciala meta, evitando en todo momento las colisiones.
Para ello, combina un algoritmo de rejilla de ocupación Certainty Grids para la representación del mapa de obstáculos junto con un algoritmo para la tarea de navegación local que utiliza el enfoque de los campos potenciales GPF (Generalized Potencial Field), el cuál se basa en la idea conceptual de que los obstáculos generan fuerzas de repulsión sobre el robot mientras que la meta genera fuerzas de atracción sobre él.